All five models have pretty much the same feature set starting with a proprietary 12-spoke injection-molded frame. This frame is very open to reduce reflections back into the cone and also has a very generous mounting flange making multiple driver arrays cosmetically attractive and compact.
The DMA58 cone assembly consists of a black anodized aluminum cone, with a 26 mm diameter convex aluminum dust cap (directly coupled to the voice coil former), and suspended with NBR and a 45 mm diameter treated cloth surround spider (damper) for compliance. “B” for the cone assembly is supplied by a neodymium slug-type motor with an additional bucking magnet to focus flux into the gap area. Driving the assembly is a 1” aluminum vented (five 2 mm diameter vents below the spider mounting shelf and 10 more 2 mm diameter vents above it) former wound with two layers of round copper wire. Other features include a large copper cap shorting ring (Faraday Shield) that lowers distortion and extends the high-frequency SPL profile. Tinsel leads connect on one side of the cone to a pair of solderable terminals.
I commenced testing the Dayton Audio DMA58-4 using the LinearX LMS analyzer and VIBox to create both voltage and admittance (current) curves. The driver was clamped to a rigid test fixture in free-air at 0.3 V, 1 V, 3 V, and 6 V. It should also be noted hat this multi-voltage parameter test procedure includes heating the voice coil between sweeps for progressively longer periods to simulate operating temperatures at that voltage level (raising the temperature to the first and second time constants).
Next, I post-processed the eight 550-point stepped sine wave sweeps for each of the DMA58-4 samples and divided the voltage curves by the current curves (admittance) to produce the impedance curves, phase generated by the extremely accurate LMS calculation method. I imported the data, along with the accompanying voltage curves, into the LEAP 5 Enclosure Shop software. Next, I selected the complete data set, the multiple voltage impedance curves for the LTD model, and the 1 V impedance curve for the TSL model in the transducer derivation menu in LEAP 5 and created the parameters for the computer box simulations.
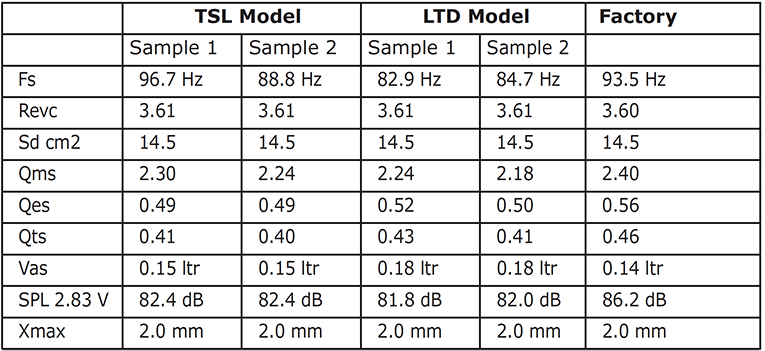
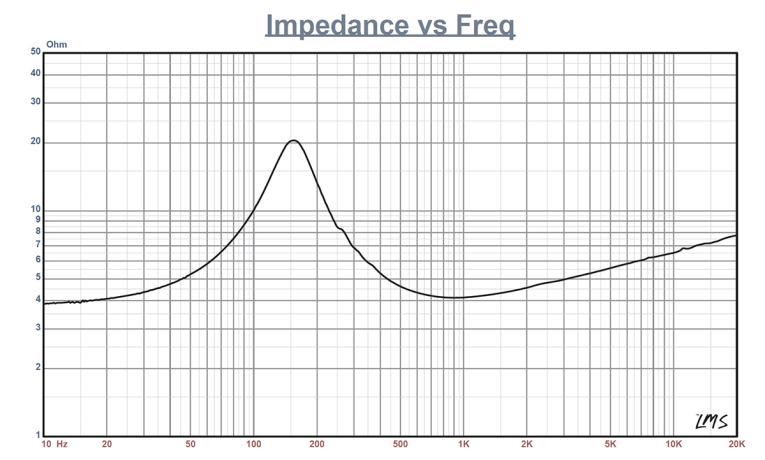
Figure 1 shows the 1 V free-air impedance curve. Table 1 compares the LEAP 5 LTD, the TSL data, and the factory parameters for both of the Dayton Audio DMA58-4 samples. LEAP TSL/LTD parameter calculation results for the DMA58-4 were decidedly similar to the factory data. There was a variation in the sensitivity numbers, but mine are calculated from the Thiele-Small (T-S) routine, while the Dayton data appears to be a SPL average at some specified bandwidth. As always, I followed my usual protocol and set up computer enclosure simulations using the LEAP LTD parameters for Sample 1. This consisted of a 5.2 in3 Butterworth sealed box with 50% damping material (fiberglass), and an 8.3 in3 passive radiator incarnation using the data from a Dayton DMA58-4 2” drone radiator. This alignment was tuned to 70 Hz with 15% damping material (fiberglass) in the box.
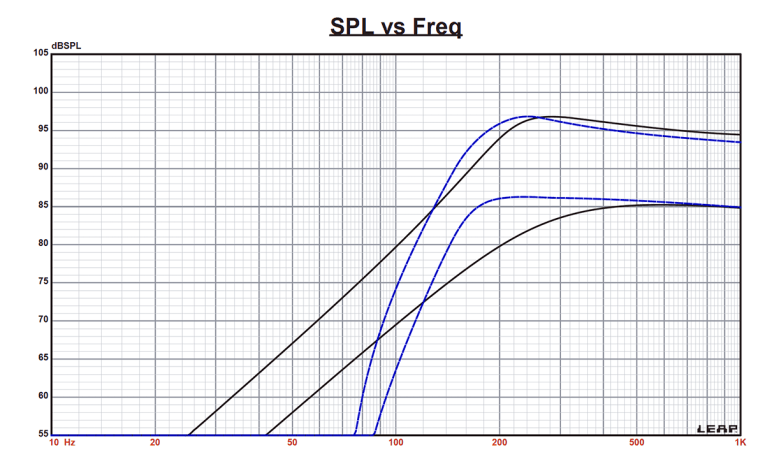
Figure 2 displays the results for the DMA58-4 in the sealed and box simulations at 2.83 V and at a voltage level sufficiently high enough to increase cone excursion to Xmax + 15% (2.3 mm for the DMA58-4). This produced a F3 frequency of 252 Hz (F6 =191 Hz) with a Qtc = 0.68 for the 5.2 in3 sealed enclosure and –3 dB = 158 Hz (-6 dB = 145 Hz) for the 8.3 in3 passive radiator simulation.
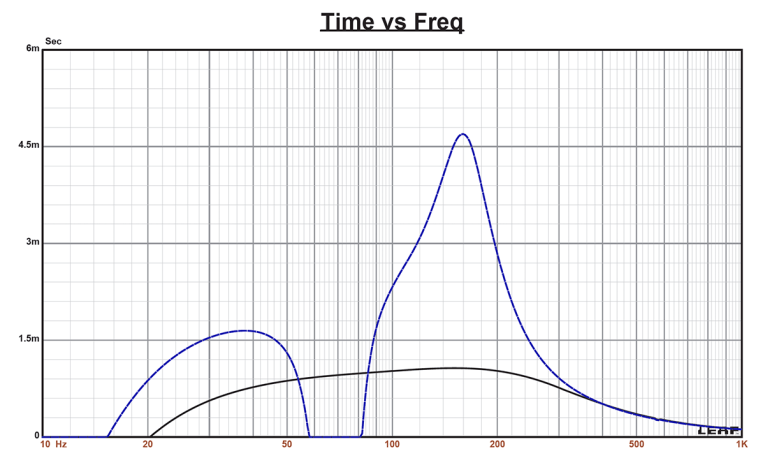
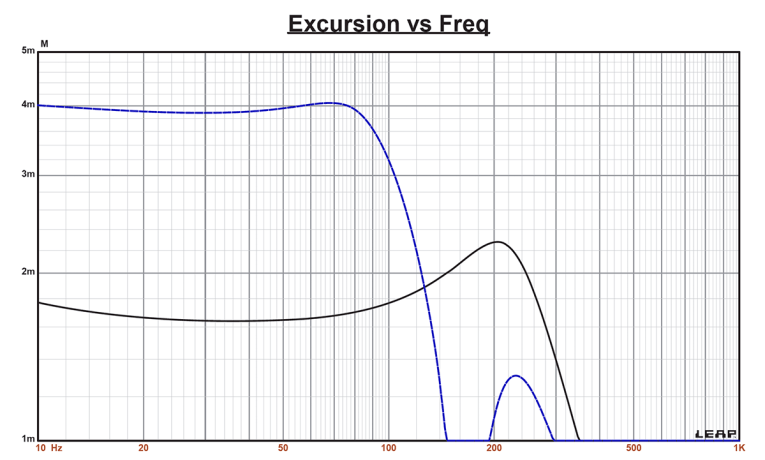
Increasing the voltage input to the simulations until the maximum linear cone excursion was reached resulted in 97 dB at 20 V for the sealed enclosure simulation and the same 97 dB with the same 10 V input level for the passive enclosure. Figure 3 shows the 2.83 V group delay curves. Figure 4 shows the 20/10 V excursion curves). The voltage to the passive radiator simulation was limited to 10 V as the excursion curves rises steeply below 110 Hz. As with any vented or passive radiator enclosure, a high-pass filter is highly desirable and would increase the useful output of the DMA58 substantially.
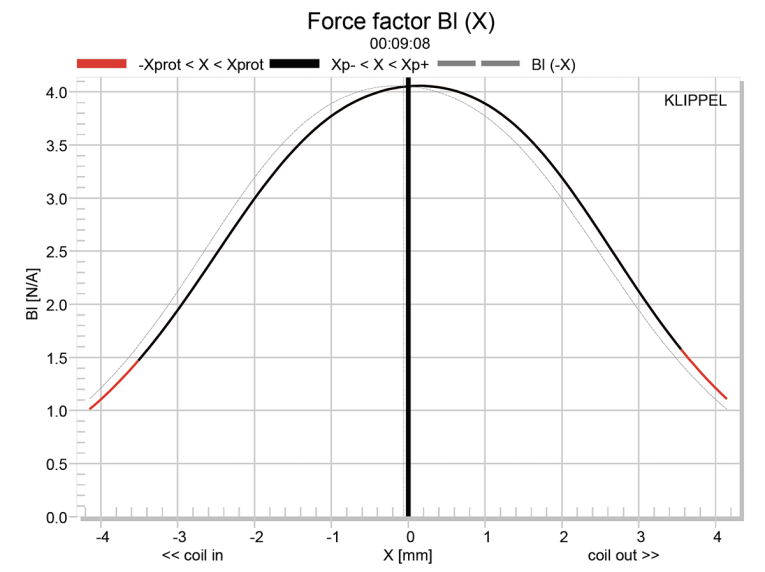
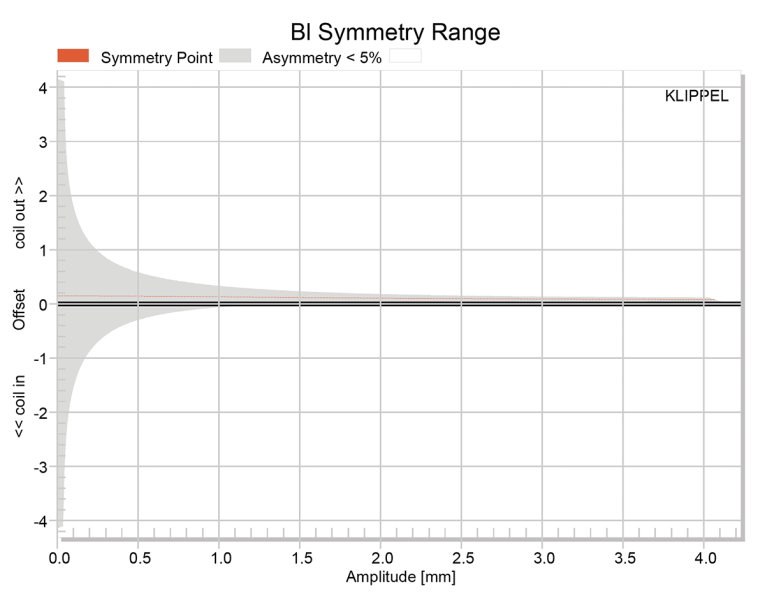

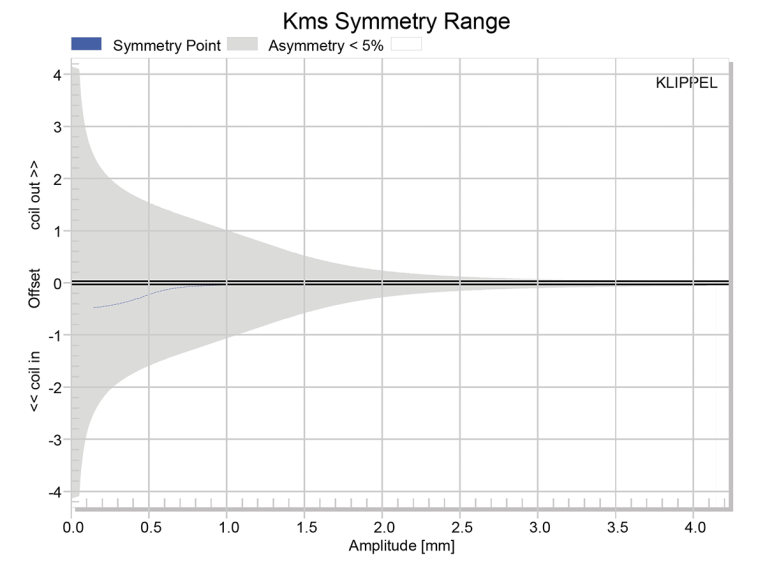
Klippel analysis for the DMA58-4 produced the Bl(X) and Kms(X) shown in Figures 5-8. The Bl(X) curve for the DMA58-4 (see Figure 5) is typical for a short Xmax driver and is very symmetrical with little or no offset. Looking at the Bl symmetry plot (see Figure 6), this curve validates the Bl(X) curve and also shows virtually no offset. The stiffness of suspension Kms (X) curve (see Figure 7) is also very symmetrical, with zero tilt and no offset. Looking at the Kms symmetry range curve (see Figure 8), again there is no offset to consider.
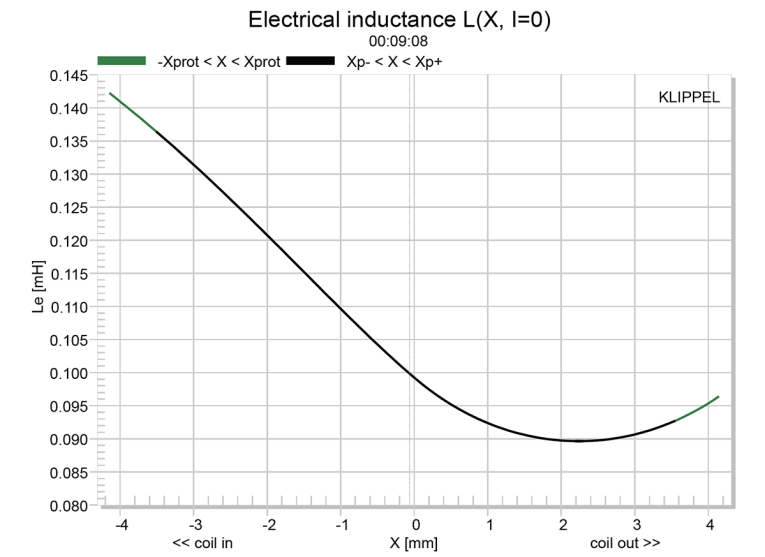
Figure 9 gives the inductance curve Le(X). Inductance will typically increase in the rear direction from the zero rest position, which is what happens here, however, the DMA58 incorporates a copper shorting cap so the inductive swing is very small. Inductance variation for the DMA58-4 is only 0.01 mH to 0.02 mH from the coil-in and coil-out Xmax positions, which is good.
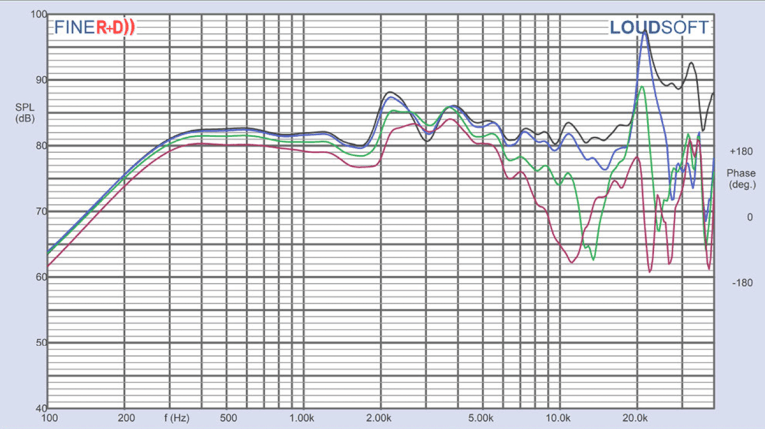
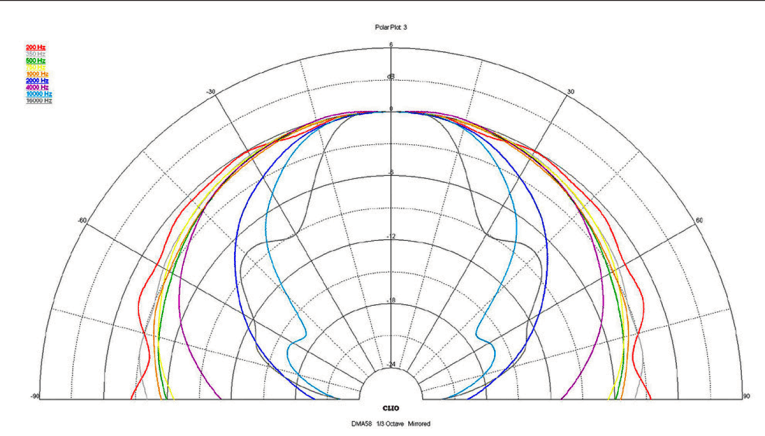
purple = 45°).
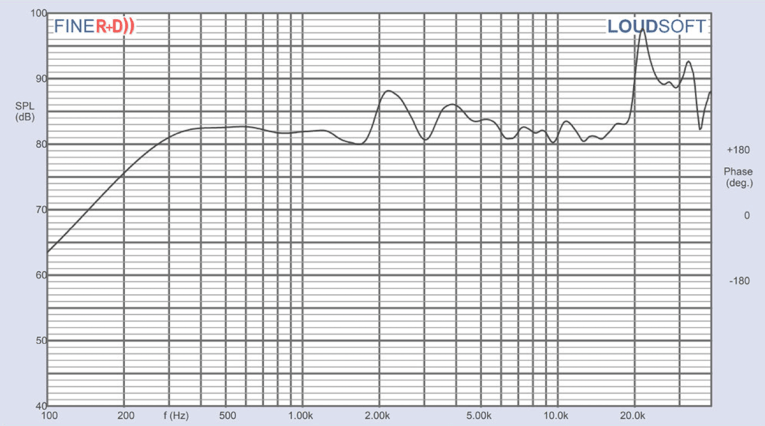
Next I mounted the DMA58-4 in an enclosure that had a 9” × 4” baffle and was filled with damping material (foam). Then, I measured the transducer on- and off-axis from 300 Hz to 40 kHz frequency response at 2.83 V/1 m using the 192 kHz Loudsoft FINE R+D analyzer and the GRAS Sound & Vibration 46BE microphone. Figure 10 gives the DMA58-4’s on-axis response indicating a ±4 dB SPL variation from 300 Hz to 20 kHz with sharp break up mode peaking modes at 21 kHz to 33 kHz.
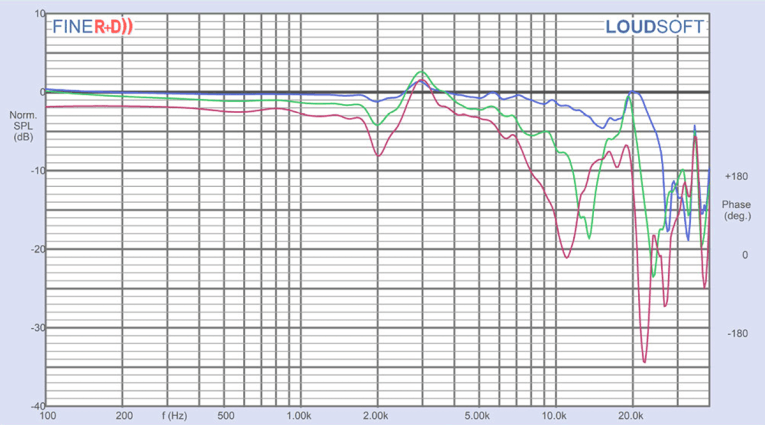
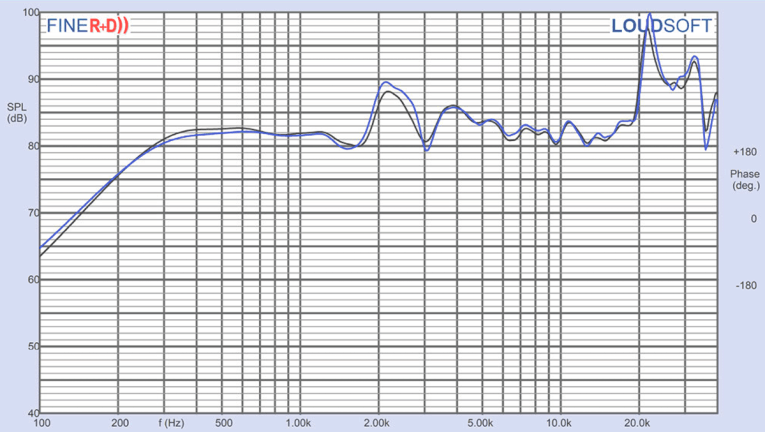
Figure 11 displays the on- and off-axis frequency response at 0°, 15°, 30°, and 45°. Figure 12 gives the off-axis curves normalized to the on-axis response, with the Audiomatica CLIO 180° polar plot (measured in 10° increments) depicted in Figure 13. The two-sample SPL comparison is illustrated in Figure 14, showing the two samples to be matched with 0.5 dB to 0.75 dB, except for a small area centered on 2 kHz.
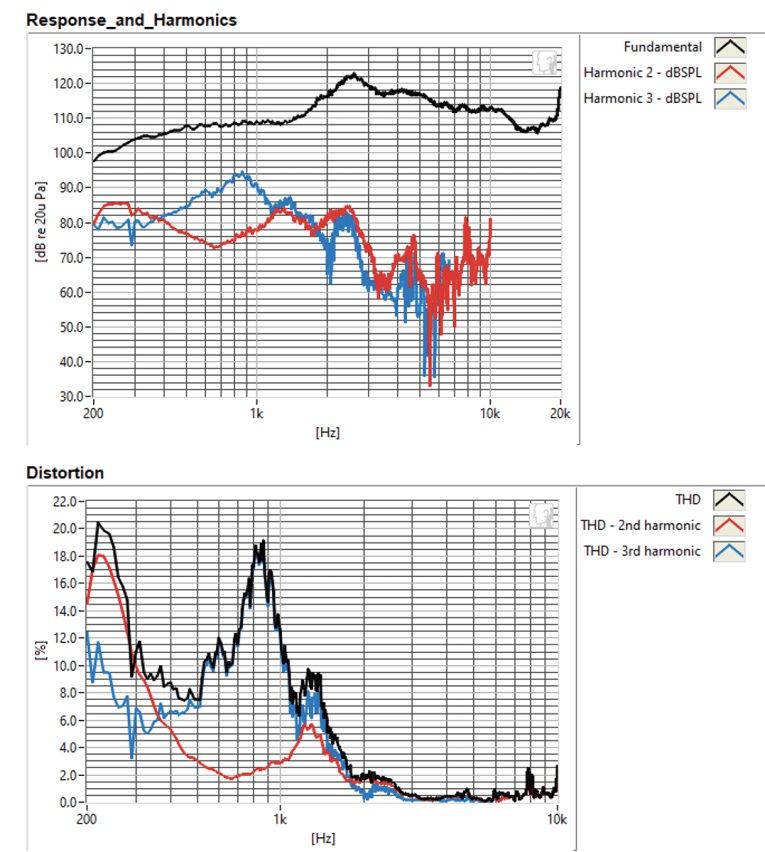
Next, I employed the Listen, Inc. AudioConnect analyzer operating with SoundCheck 17 software along with the Listen 1/4” SCM microphone (courtesy of Listen, Inc.) to measure distortion and generate time-frequency plots. For the distortion measurement, the DMA58-4 was mounted rigidly in free-air, and the SPL set to 94 dB at 1 m (9.86 V), using a pink noise stimulus. The distortion was measured with the microphone placed 10 cm from the dust cap. This produced the distortion curves shown in Figure 15.
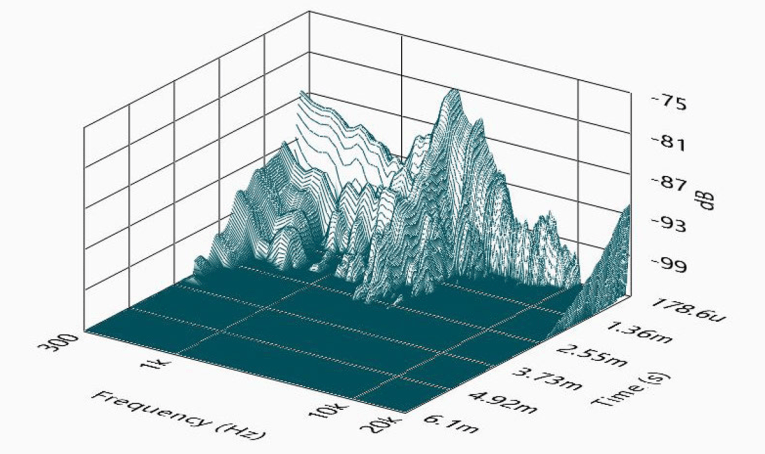

I then used SoundCheck to get a 2.83 V/1 m impulse response for this driver and imported the data into Listen’s SoundMap Time/Frequency software. The resulting cumulative spectral decay (CSD) waterfall plot is shown in Figure 16. The Wigner-Ville plot (used for its better low-frequency performance) is shown in Figure 17.
The performance of the DMA58 is quite good for this small of a driver, and should be quite effective in array applications. For more information about this and other Dayton Audio transducers, visit www.daytonaudio.com. VC
This article was originally published in Voice Coil, December 2019.