
In this article, I will take you on a brief trip down the evolution of feedback speakers, before previewing SubVo's Bend-Sensor and Klara-T servo-control approach to feedback error correction in loudspeakers, promised for next week.

The reason amplifiers have a fraction of a percent distortion, even the less inspired designs, is due to negative feedback correction. Negative feedback occurs when the output of a system is fed back to reduce the deviation of the output from the input. By returning an out-of-phase output signal back to the input, errors can significantly cancel.
But the biggest remaining challenge is with including the speaker in the feedback loop. Anyone who thinks feedback correction (servo-control) is a no-brainer to instantly fix poor speaker performance is in for more than a few surprises. Servo control definitely offers performance improvements not readily achieved by tweaking physical construction, but there are many new design rules with which to wrestle. Nevertheless, finding a robust stable sensor and the right positioning location can be game-changing (more about that later).
Yet perhaps what blocked making feedback speakers practical has been two-fold. One was that amplifier feedback loops are picky. To keep the "network" stable, an integrated solution is needed for fighting chance of a reliable design. While essentially all subwoofers today have the amp built-in, same for soundbars, smart speakers, and smartphones - all these "systems" are optimized and all variables predetermined by the design team before going into the shipping carton. But 20 years ago, the receiver was matched to the speakers in the retail store, the wire selection and wire run was also random. The unpredictable nature of separate components was confounded by servo-control - and integrated systems were just not popular in days gone by.
One of the first feedback network loudspeaker designs was introduced in 1965 by LWE, designed by geophysical engineer Louis W. Erath. Employing a back-EMF-based negative feedback network, enabled over-sized woofers to behave as if they were in a larger enclosure. The speakers were picky about what they connected to and were typically paired with McIntosh amplifiers but also worked well with many of the Japanese receivers of the day.
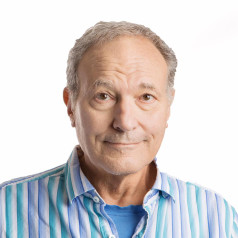
In 1968, Infinity, while still a start-up, launched its Servo-Statik 1 and created quite a splash in the audiophile world. The 18"woofer itself was built by Cerwin-Vega, facing downward from a 2' cubic enclosure, it uniquely boasted a sensing coil coincident with the main voice coil. The signal induced into the sensing coil was fed back to the bass amplifier to provide the "servo" correction. While dramatic, it wasn't a completely stable design and was eventually discontinued in 1972.

In 1978, AudioPro, a Swedish startup (still very much alive today) introduced its ACE Bass negative output impedance scheme. In an audio system, the damping factor is the ratio of the impedance of the loudspeaker to the source impedance. The amplifier feedback contributes to the low-source impedance of the output stage. High feedback amplifiers have almost negligible source impedance - but imagine if you could have less than zero - then you could negate the voice coil characteristics and you could start with a clean slate. In this way, ACE Bass electronically synthesized the attributes of an "ideal speaker," or at least enabled the speaker designer to achieve virtual Thiele-Small parameters without some of the physical implications and compromises. The network is connected in series with the actual speaker and the voltage characteristics between the two are compared in real time. The difference is sent back to the amplifier as an inverse corrective voltage and fed into the input of the amplifiers negative feedback output stage.
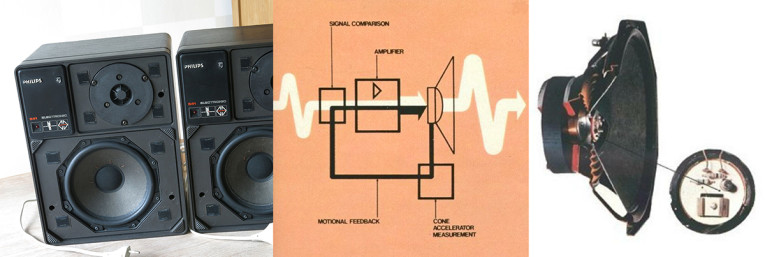
In 1989, I began work with Yamaha in Japan on the Yamaha Active Servo Technology (YST). The efforts involved many similarities but also some differences with MFB and ACE Bass. Developed to expand low-frequency reproduction, it involved two technologies. One was the Air Woofer (port) and the other was Negative Impedance Drive, which drives the speaker to cancel the impedance of the voice coil so the apparent impedance of the speaker is zero. The former was performed by a speaker, and the latter by an amplifier. Thirty years later, Active Servo Technology continues to be a cornerstone of Yamaha's audio products.
SubVo's Loudspeaker Sensor & klaraT Processing
Next, we take a close look at the subVo servo-pickup bend-sensor, a unique screen-printed sensor that changes in resistance when bent. It is durable, has a long stable life, and is inexpensive to produce in mass quantities. SubVo's KlaraT is a proprietary DSP algorithm that controls the feedback loop, offers over-excursion protection, and eliminates end-of-line calibration routines required with other feedback techniques. The Klara-T self-calibration also compensates for degradation of the loudspeaker (surround/spider wear and tear and magnet sensitivity losses) over time and any change in the loudspeaker's environment.
Loudspeakers have always been the weak link in audio. While we speaker guys do our best to achieve high-fidelity reproduction, speaker audio quality often falls short due to the many physical constraints in design, size, and other transducer topology trade-offs. The speaker motor and the suspension are prone to nonlinearities not just from design constraints and build consistency, but also time varying. If we have real-time position monitoring of the diaphragm, and the motion profile is known, these limitation and compromises can be minimized through error feedback correction.

First, audio systems must integrate the amplifier and speaker into the same enclosure as feedback loops don't like long or varying wire runs. We have all seen the evolution and dominance of one box audio solutions. Subwoofers, soundbars, Bluetooth, and smart speakers all are self-contained. And even in pro-sound we have powered studio monitors and active sound reinforcement speakers.
Second, we need a low-cost, precise, and stable sensor that will not degrade or interfere with the physical operation of the speaker.
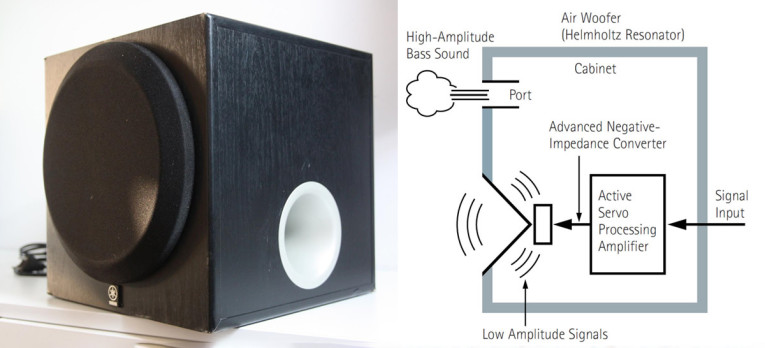
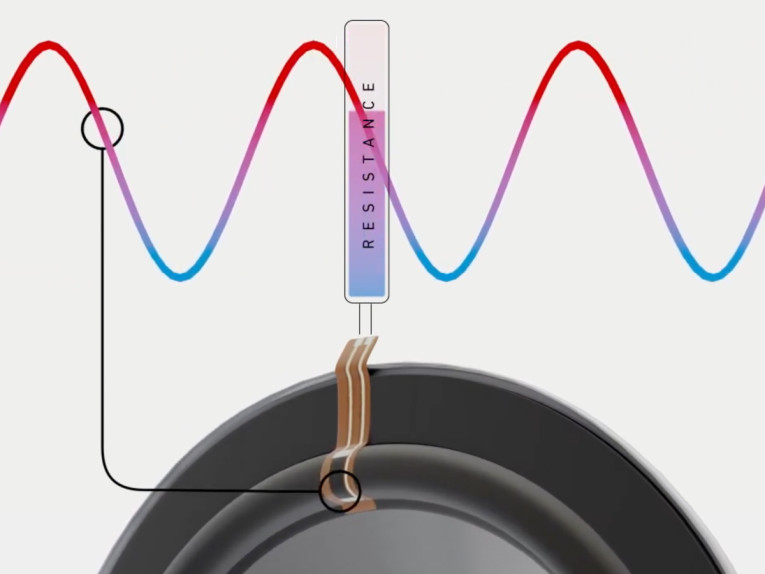
This requirement for a low-cost, precision sensor is just now reaching the audio industry with the launch of the patented bend-sensor - a unique screen-printed sensor that changes in resistance when bent. Recently adapted and optimized for speakers, founders Joe Harris and John Kelley first introduced the subVo technology at the 2020 CES, last January.
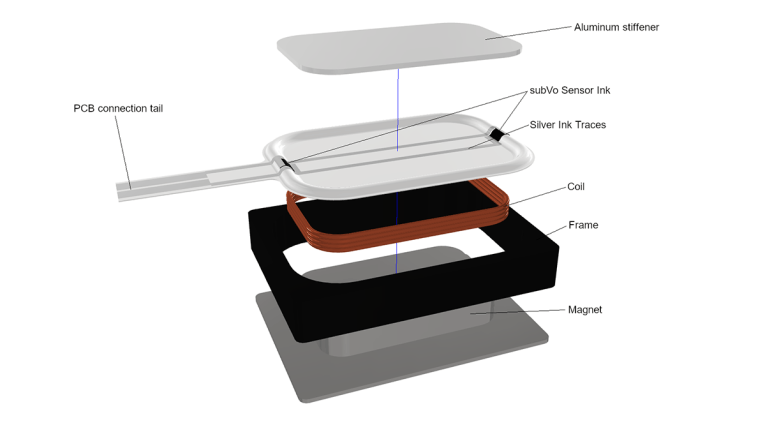
Let's start with the physical characteristics of the bend sensor. The sensor consists of a proprietary conductive coating that has "flex-points," which precisely change in electrical conductivity with the degree of bend angle. The single-layer thin-film substrate is typically polyimide (DuPont Kapton). It is very durable, resistive in nature, and free of reactive components, such as capacitance or inductance. Nor does it have the high Q resonances in the audio band inherent to alternative sensors. The bend-sensor also has a long life and is inexpensive to produce in mass quantities. For microspeakers, an application-specific bend-sensor can be integrated into the assembly with the conductive "tracks" directly deposited onto the diaphragm/surround.
The mounting position for the bend-sensor can be to the bobbin or the cone, with the other end fixed to a non-moving (stationary component), such as the frame or the magnetic structure. The surround may be used on some speaker designs, although edge resonances in the surround are a consideration.
SubVo ' s klaraT is the speaker compensation algorithm that controls the feedback loop, enabling each speaker to self-calibrate. All speakers have slightly different specification characteristics as they roll off the production line and with self-calibration this disparity is eliminated, enabling higher production yield.
Beyond enabling more consistent quality without sorting and binning critical components, servo-correction tracks the cone's exact position at any given moment, enabling lower distortion and extending bass - all in smaller enclosures. Speakers can be driven to their limits without damage and with low distortion. Both short- and long-term performance is maintained with compensation for degradation of the loudspeaker (e.g., surround/spider wear and tear and magnet sensitivity loses) over time, temperature, humidity, and power compression.
Aside from these more obvious benefits, we can touch upon some interesting implications of feedback correction for specific product categories (e.g., soundbars and smart speakers).
As with soundbars, feedback sensing in conferencing and voice-enabled speaker systems will be game changing, well beyond extending the bass response. Two aspects are not obvious but significant - better Acoustic Echo Cancellation (AEC) and Barge-in.
For full-duplex operation, where second talkers can contribute without having to force their way into the call, there are various signal processing algorithms. But complicating life, these algorithms are surprisingly sensitive to speaker distortion. DSP guys look for distortion levels in even modest applications (e.g., speakerphones), and aiming for unrealistic distortion performance levels not easily found in real world speakers. With sensor feedback helping with distortion cancellation, AEC algorithms can do a better job, with more margin.
"Barge-In" is a term that originated with half-duplex telephony where participants struggle to interrupt and engage with the incumbent talker. These days, "barge-in" additionally refers to the ability to summon (or trigger) a voice assistant in smart speakers or voice-enabled products, prompt the ability to respond quickly and accurately to voice commands while ignoring its own audio. That is easier said than done as the loudspeaker is closer to the mic than the person giving the voice commands. Existing barge-in algorithms use DSP to subtract or cancel out the music so only the voice is captured. This method works only if the music captured by the microphone perfectly matches the music delivered to the loudspeaker. In reality, the loudspeaker is off from the input signal. And because of this, the cancellation of the music is marginal. With the subVo sensor signal and klaraT processing in the feedback loop and the subtraction signal, we can more completely null the loudspeaker's output from the mic's pickup of the voice command.
For further information, send an email to SubVo.
This article was originally published in The Audio Voice weekly email newsletter (284 and 285).



