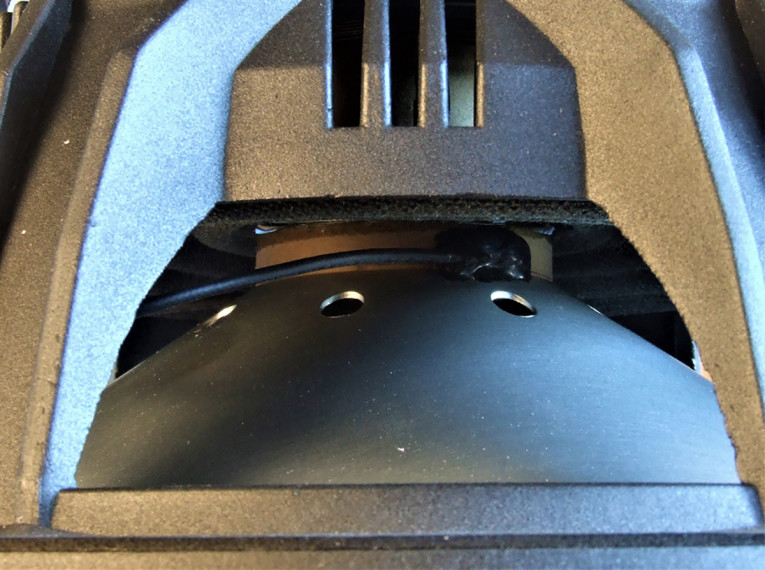
All this is driven by a 51mm (2”) diameter four-layer voice coil wound with round copper wire on a black fiber glass non-conducting former. The motor system powering the cone assembly utilizes two 20mm thick 145mm diameter ferrite magnets sandwiched between a black emissive coated 8mm thick front plate and a black emissive coated and flat T-yoke that does not use a pole vent. This non-pole vent format, when compared to motors with large pole vents, drives more air out the gap area and across the front plate below the spider mounting shelf for enhanced cooling of the motor system (Photo 2). The SW259WA01 further incorporates and as set of dual aluminum shorting ring (Faraday shields) that reduce distortion caused by eddy currents. Last, the braided voice coil lead wires terminate to a pair of gold-plated color-coded push terminals.
I began characterizing the new SW259WA01 10.25” subwoofer using the LinearX LMS analyzer and the Physical LAB IMP Box (the same type test fixture as a LinearX VI Box for measuring voltage and current separately). Sweeps were generated with the driver securely mounted in free-air at 0.3V, 1V, 3V, 6V, 10V, 15V, and 20V. The measured Mmd that was provided by Wavecor (an actual physical cone assembly measurement with 50% of the surround and spider removed) was used rather than a single 1V added (delta) mass measurement.
It should also be noted that this multi-voltage parameter test procedure includes heating the voice coil between sweeps for progressively longer periods to simulate operating temperatures at that voltage level (raising the temperature to the first and second time constants). The 14 sine wave sweeps for each woofer were further processed with the voltage curves divided by the current curves to produce impedance curves.
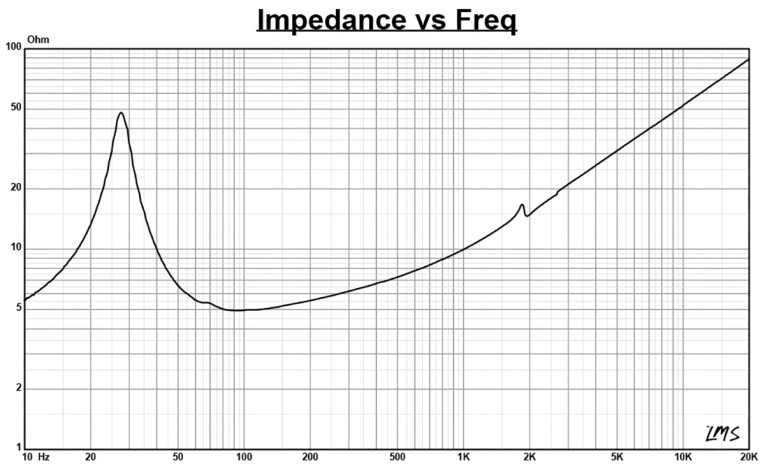
Phase curves were generated using the LEAP phase calculation routine, after which the impedance magnitude and phase curves plus the associated voltage curves were then copy/pasted into the LEAP 5 Enclosure Shop software’s Guide Curve library. This data was then used to calculate parameters using the LEAP 5 LTD transducer model. Because most all manufacturing data is being produced using either a standard transducer model or in many cases the LEAP 4 TSL model, I also generated LEAP 4 TSL model parameters using the 1V free-air that can also be compared with the manufacturers data. Figure 1 shows the 1V free-air impedance plot. Table 1 compares the LEAP 5 LTD and LEAP 4 TSL Thiele-Small (T-S) parameter sets for the Wavecor SW259WA01 driver samples along with the Wavecor factory data.
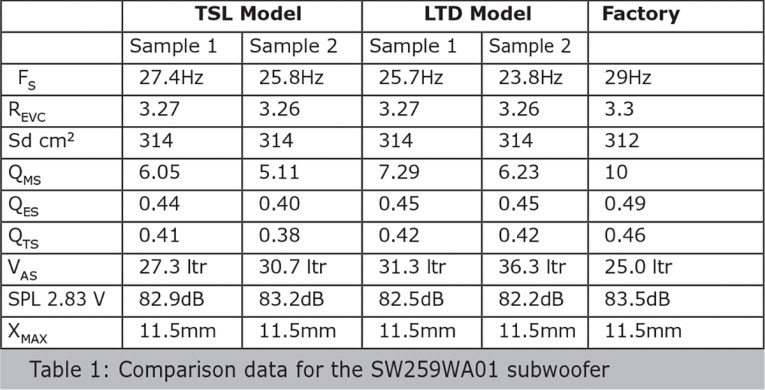
From the SW259WA01’s comparative data shown in Table 1, you can see that all four parameter sets for the two samples were reasonably similar and correlated reasonably well with the factory data. Following my normal protocol for Test Bench testing, I used the Sample 1 LEAP 5 LTD parameters and set up two computer box simulations, one in a 0.5ft3 Butterworth-type sealed enclosure with 50% fill material (fiberglass) and for the second example, a vented Chebychev/Butterworth alignment. This resulted in a 1.0ft3 box with 15% fill material and tuned to 23Hz. This is a fairly low tuning for this size enclosure, so using one of Wavecor’s passive radiators would actually be a better choice than a port tube or slot-type vent.
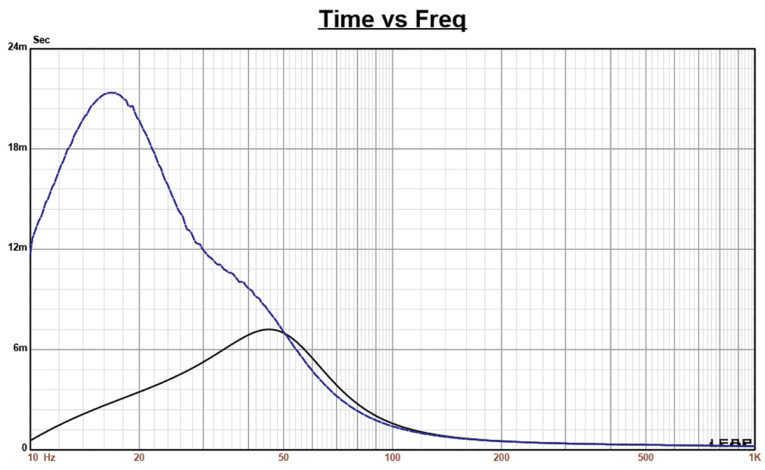
Figure 2 gives the results for the Wavecor SW259WA01 subwoofer in the sealed and vented enclosures at 2.83V and at a voltage level sufficiently high enough to increase cone excursion to Xmax + 15% (13.2mm for SW259WA01). This resulted in a F3 of 40Hz (-6dB=35Hz) with a Qtc=0.66 for the 0.5ft3 closed box and a -3dB for the vented simulation of 33Hz (-6dB=26Hz). Increasing the voltage input to the simulations until the approximate Xmax +15% maximum linear cone excursion point was reached resulted in 109.5dB at 53V for the sealed enclosure simulation and 110.5dB with a 59V input level for the larger vented box. Figure 3 shows the 2.83V group delay curves. Figure 4 shows the 53V/59V excursion curves.


Klippel analysis for the Wavecor 10.25” subwoofer was performed by Jason Cochrane at Warkwyn using the Klippel KA3 analyzer. The analysis produced the Klippel data graphs given in Figures 5–8. (Please note, if you do not own a Klippel analyzer and would like to generate this type of data on any transducer, Warkwyn is available to perform this and a myriad of other measurement and design consulting services.)
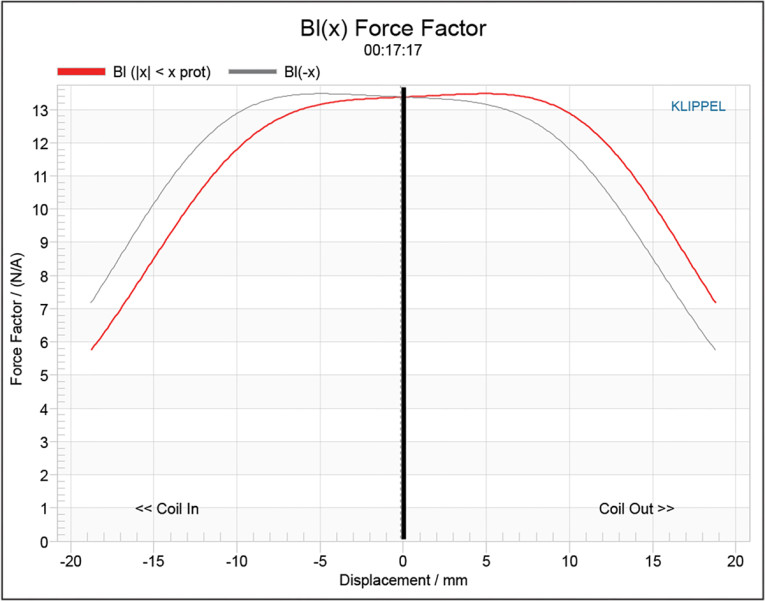
The Bl(X) curve for SW259WA01 seen in Figure 5 is broad and mostly symmetrical (with an element of “tilt”) typical of a driver with a relatively high Xmax. The Bl symmetry curve in Figure 6 shows a relatively small 1.7mm Bl coil-out (forward) offset once you reach an area of reasonable certainty around 8mm, decreasing to 1.2mm at the physical 11.7mm Xmax position and decreasing beyond this point.

Figure 7 and Figure 8 show the Kms(X) and Kms symmetry curves. Like the Bl curve, the Kms stiffness of compliance curve seen in Figure 7 is very symmetrical, with only a minor offset. The Kms symmetry range curve is likewise rather broad and also somewhat tilted. This created a 3.2mm forward offset at the physical Xmax position, decreasing as excursion increases. Displacement limiting numbers calculated by the Klippel analyzer, using the subwoofer criteria for Bl, was XBl @ 70% (Bl dropping to 70% of its maximum value) equal to 113.9mm for the prescribed 20% distortion level (the criterion for subwoofers). For the compliance, XC @ 50% Cms minimum was greater than 17mm, which means that for the Wavecor subwoofer, the Bl is the more limiting factor for getting to the 20% distortion level, however, both numbers were greater than the 11.2mm physical Xmax of the driver.


Figure 9 gives the inductance curve Le(X) for this transducer. Motor inductance will typically increase in the rear direction from the zero rest position as the voice coil covers more of pole, however that doesn’t happen here. What we do get is lower inductance variation from full in to full out travel, which is the goal you want to achieve. It’s easy to see the benefit of the dual aluminum shorting rings with inductance only varying about 0.02mH to 0.04mH from Xmax in to Xmax out, which is very minimal inductance change for such a large motor.

Given that the SW259WA01 is a subwoofer mostly intended for applications below 100Hz, I dispensed with the SPL measurements since this driver will not likely be crossed over much over 100Hz. That said, the factory-generated frequency response curve can be seen in Figure 10. I also dispensed with time-frequency analysis for subwoofers as the data is not really significant below 100Hz.

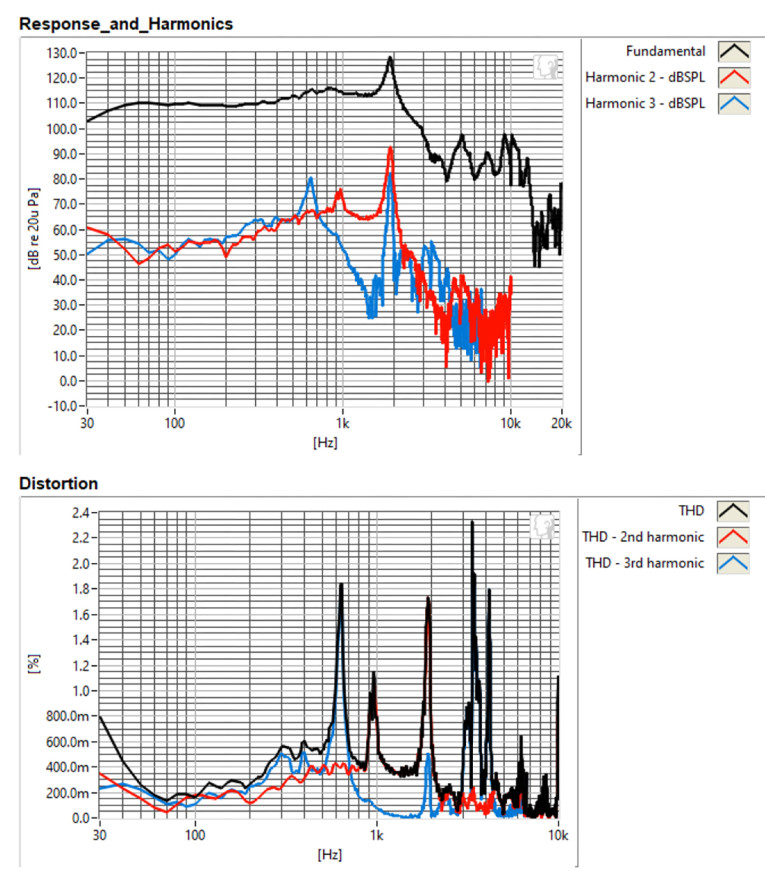
Next, I used the Listen, Inc. SoundCheck analyzer to perform distortion analysis. For the distortion measurements, I set the voltage level with the driver rigidly mounted in free-air and increased the voltage until it produced a 1m SPL of 94dB (10.2V), my distortion SPL standard for home audio drivers. Then, I made the distortion measurement with the microphone placed near-field about 10cm from the dust cap. Figure 11 shows this plot for the 10.25” SW259WA01 subwoofer. As can be seen, this actually includes two plots—the top graph being the standard fundamental SPL curve with the second and third harmonic curves, and the bottom graph the second and third harmonic curves plus the THD curve with an appropriate X-axis scale. Interpreting the subjective value of conventional distortion curves is almost impossible; however, looking at the relationship of the second to third harmonic distortion curves is of value.
As you can see from this month’s explication, the SW259WA01 is another well-crafted transducer from the engineers at Wavecor. Given its 40Hz F3 performance in a compact sealed box, I would probably use DSP to boost the response down to around 25Hz rather than use a vent or passive radiator and get the benefit of lower group delay. For more information, visit www.wavecor.com. VC
This article was originally published in Voice Coil, February 2023.