
Features for the 6MBX44 are similar to those found in the 8MBX51. The frame is a proprietary four twin spoke cast-aluminum frame incorporating a series of four 40 mm × 1 mm rectangular vent holes in the area below the spider mounting shelf for enhanced voice coil cooling. This series of cooling vents moves air past the voice coil and across the front of the neodymium motor assembly. Additional convection cooling is provided by a 22 mm pole vent.
The cone assembly consists of a curvilinear paper cone with a front side waterproof hydrophobic coating and a 3” diameter inverted paper dust cap, likewise with a waterproof hydrophobic coating. Compliance is provided by a triple roll “M” shaped pleated coated cloth surround with the remaining compliance comes from a 3.5” diameter elevated cloth spider.
The motor design on the 6MBX44 utilizes a neodymium ring magnet, T-shaped pole piece fitted with an aluminum shorting ring located below the yoke (Faraday Shield). The neodymium ring magnet motor was finite element analysis (FEA) designed using a 44 mm (1.7”) diameter voice coil inside/outside (one layer wound on the inside of the former and one layer wound on the outside of the former) with round copper-clad aluminum wire (CCAW) on a nonconducting glass fiber former. Motor parts, the return cup, and the front plate are coated with a black heat emissive coating for improved cooling. Last, the voice coil is terminated to injection-molded terminal block with solderable terminals. Cosmetically speaking, this is very good-looking driver.


I commenced analysis of the 6MBX44, using the LinearX LMS analyzer and VIBox to create both voltage and admittance (current) curves with the driver clamped to a rigid test fixture in free air at 0.3, 1, 3, 6, and 10 V. The driver remained acceptably linear enough for LEAP 5 to curve fit at 10 V, which is a lot “juice” for any 6.5” woofer.
Following my established protocol for Test Bench testing, I no longer use a single added mass measurement and instead use the physically measured Mmd data (11.13 grams for the 6MBX44). I post-processed the collected data and the ten 550-point sine wave sweeps for each 6MBX44 sample. Then, I divided the voltage curves by the current curves to generate impedance curves, with the phase derived using the LMS calculation method, and imported them, along with the accompanying voltage curves, to the LEAP 5 Enclosure Shop software.
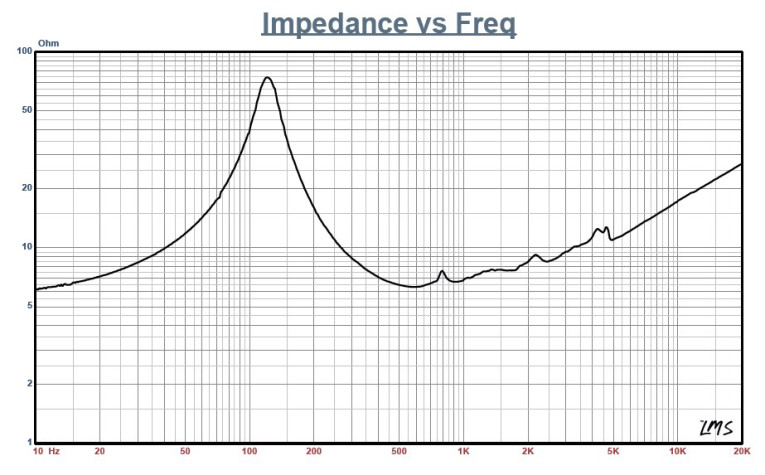
Because Thiele-Small (T-S) data provided by the majority of OEM manufacturers is generated using either the standard model or the LEAP 4 TSL model, I additionally created a LEAP 4 TSL parameter set using the 1 V free-air curves. I selected the complete data set, the multiple voltage impedance curves for the LTD model, and the 1 V impedance curve for the TSL model in the transducer parameter derivation menu in LEAP 5 and created the parameters created for the computer box simulations. Figure 1 shows the 1 V free-air impedance curve. Table 1 compares the LEAP 5 LTD and TSL data and factory parameters for both of the B&C Speakers 6MBX44 samples.
LEAP parameter calculation results correlated reasonably well with the factory published data, except for the Xmax number. B&C Speakers uses its own definition of Xmax, which is why it’s different. Standard practice and what you will find in my book (The Loudspeaker Design Cookbook) is Xmax = (Hvc- Hg)/2, so with a voice coil length of 10 mm and a gap height of 6 mm, Xmax is 2 mm. B&C Speakers uses Xmax = (Hvc-Hg)/2 + Hg/4, so it would be 2 mm plus 1.5 mm (Hg/4), which is why it publishes Xmax for this driver at 3.5 mm. This actually is somewhat similar to the compensation factor I do in finding the maximum SPL of a driver in a LEAP 5 box simulation when I raise the input voltage until the excursion maximum is Xmax + 15%. (This comes from Mark Gander’s work at JBL Pro some years ago, and is based on excursion beyond Xmax producing 3% THD). For the 6MBX44 Xmax + 15% is 2.3 mm, but even that is a lot more conservative than the B&C Speakers’ Xmax definition.
I also publish the Klippel data on drivers, which is also a way of estimating maximum excursion that produces a level of distortion when Bl decreases to 70% of its at-rest value for 20% distortion, or Bl decreases to 82% of its at-rest value for 10% distortion. Beyond this idiosyncrasy, the parameter data I measured correlated well with the B&C Speakers data. However, I followed my protocol and set up computer enclosure simulations using the LEAP LTD parameters for Sample 1. I programmed two computer box simulations into LEAP 5 — one the factory recommended vented box with a 0.11 ft3 volume (15% fill material) tuned to 120 Hz and a second vented enclosure Extended Bass Shelf (EBS) with a 0.09 ft3 volume simulated with 15% fiberglass damping material and tuned to 114 Hz.
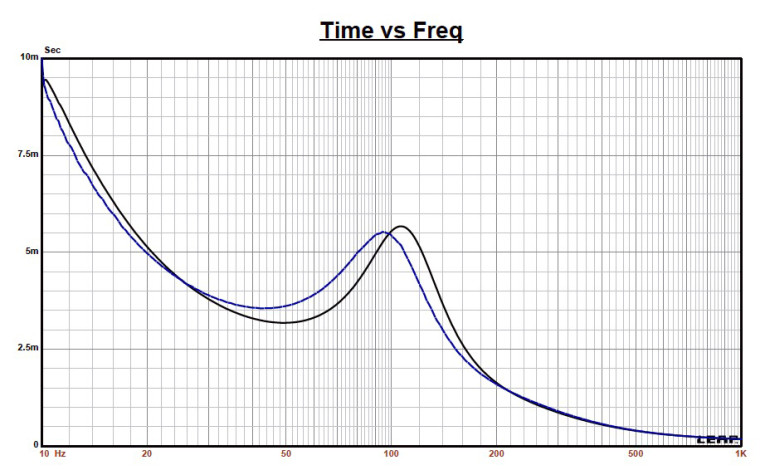
Figure 2 displays the results for the 6MBX44 in the two enclosures at 2.83 V and at a voltage level sufficiently high enough to increase cone excursion to Xmax + 15% (2.3 mm for the 6MBX44). This produced a F3 frequency of 121 Hz (F6 = 104 Hz) for the factory recommended enclosure and –3 dB = 151 Hz (F6 = 110 Hz) for the smaller EBS vented box simulation. Increasing the voltage input to the simulations until the maximum linear cone excursion criteria was reached resulted in 110 dB at 15 V for the factory recommended box and 110 dB for a 15 V input level for the smaller EBS vented enclosure. Figure 3 shows the 2.83 V group delay curves. Figure 4 shows the 15 V excursion curves. In the case of box vented box simulations, excursion goes beyond the 2.3 mm Xmax + 15% around 75 Hz, so a 60 to 70 Hz steep (24 dB/octave) high-pass filter would be a useful addition and prevent over excursion and distortion.
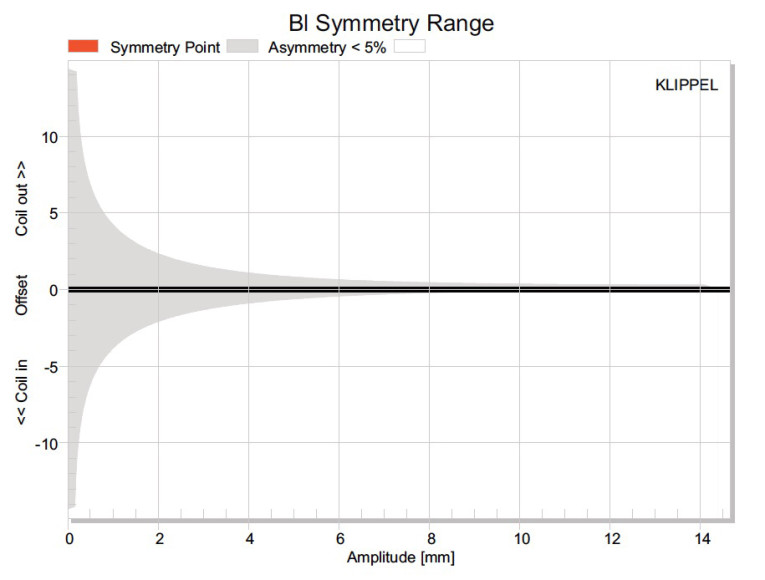
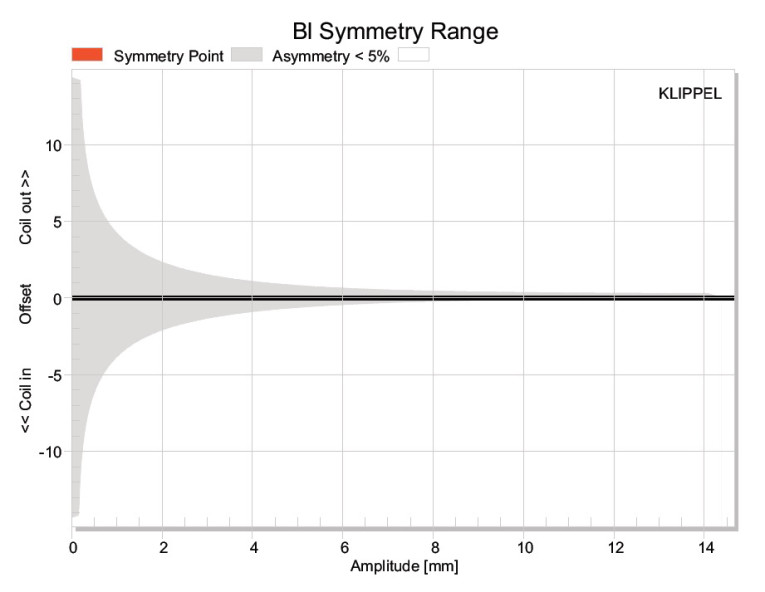
Klippel analysis produced the Bl(X), Kms(X), and Bl and Kms symmetry range plots, which are shown in Figures 5–8. The Bl(X) curve (see Figure 5) is moderately broad and about as symmetrical as it gets, with a trivial amount of coil-out offset. Looking at the Bl symmetry plot (see Figure 6), the displacement line is indistinguishable from the at-rest graph axis, however, the degree of uncertainty is still pretty high at the physical 2 mm Xmax position, but it looks good.
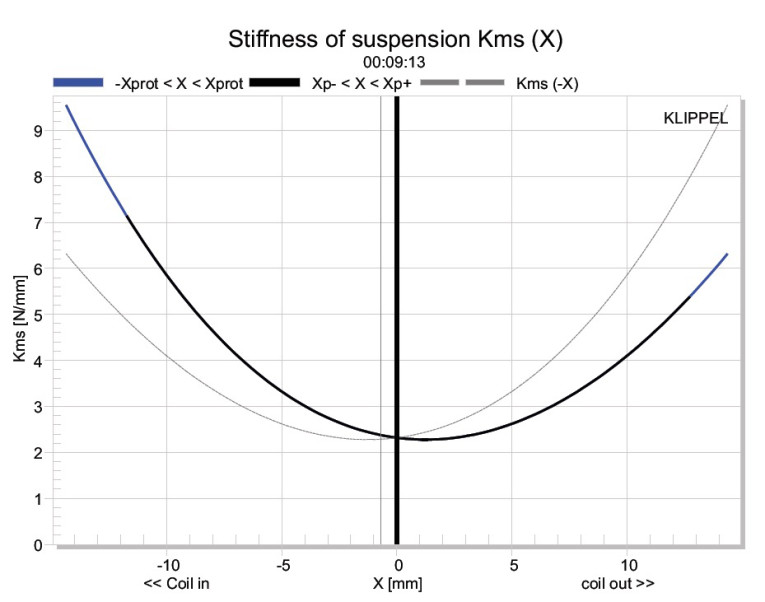
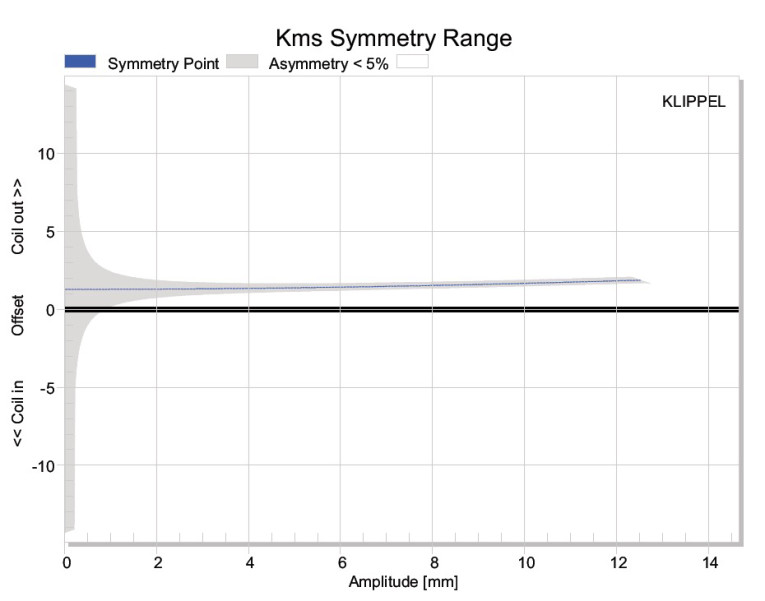
Figure 7 and Figure 8 show the Kms(X) and Kms symmetry range curves for the 6MBX44. The Kms(X) curve is also fairly symmetrical in both directions, as well as having an obvious coil-out offset.
Looking at the Kms symmetry range plot shown in Figure 8, there is a 1.2 mm coil-out offset 2 mm (an area of reasonable certainty, indicated by the shaded grey area) at the physical Xmax. Displacement limiting numbers calculated by the Klippel analyzer for the 6MBX44 were XBl at 82% Bl = 7.6 mm and for XC at 75% Cms minimum was 4.3 mm, which means that for the 6MBX44, the compliance is the most limiting factor for prescribed distortion level of 10%. However, both numbers are way beyond the driver’s physical Xmax, so it’s hard to attach meaning to them other than to suggest it should stay well behaved when over-driven.
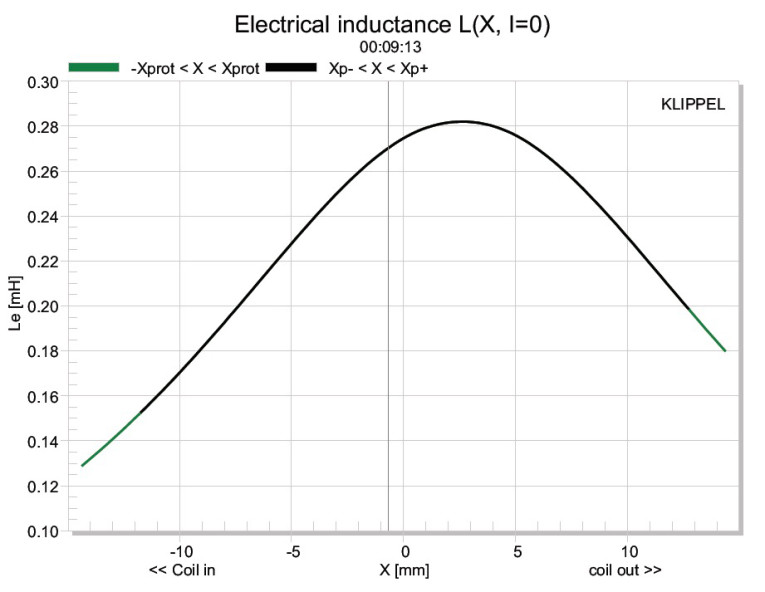
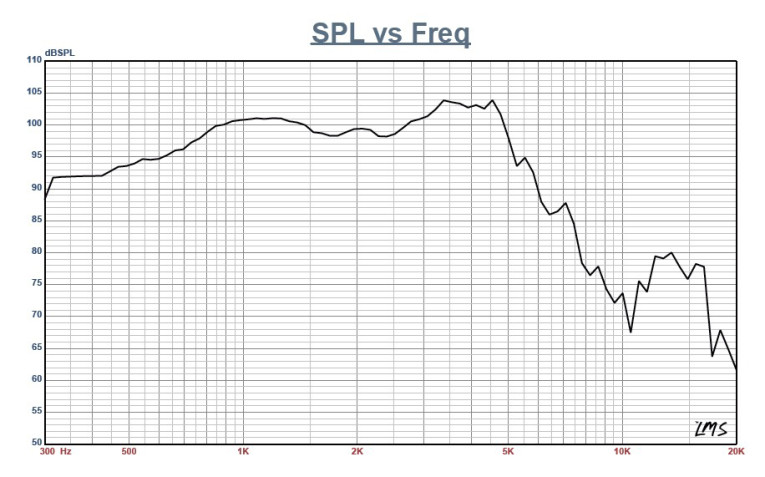
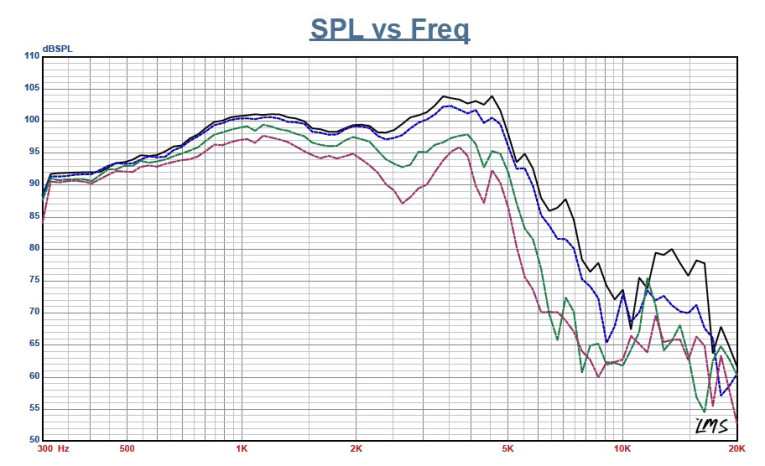
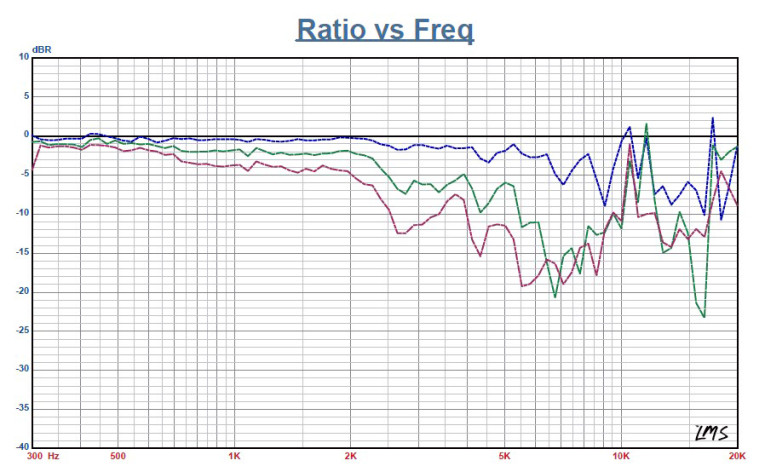
Figure 9 shows the inductance curves Le(X) for the 6MBX44. Inductance will typically increase in the rear direction from the zero rest position as the voice coil covers more pole area, which is what is happening here. However, with an aluminum shorting ring installed in the 6MBX44, the inductance swing for this driver is a maximum of 0.012 mH, which is good for minimizing distortion.
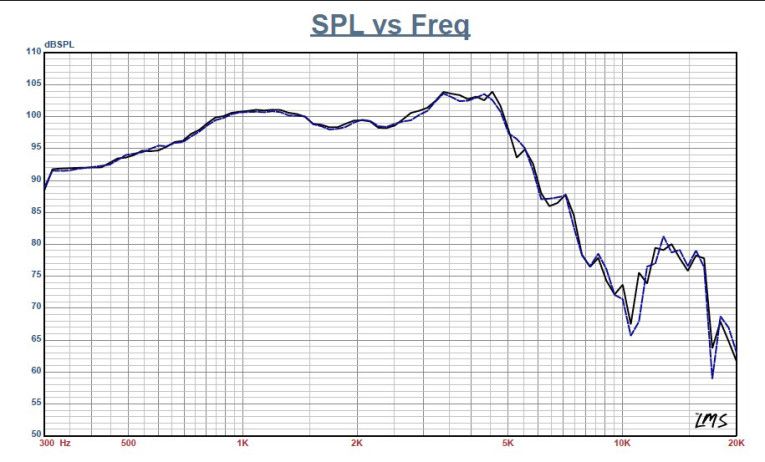
Next, I mounted the 6MBX44 woofer in a foam-filled enclosure that had a 15” × 8” baffle. Then, I measured the DUT on and off axis from 300 Hz to 20 kHz at 2.83 V/1 m using the LinearX LMS analyzer set to a 100-point gated sine wave sweep. Figure 10 gives the 6MBX44’s on-axis response, indicating a smoothly rising response with no break up modes or peaking out to about 4 kHz, where it begins its low-pass roll-off.
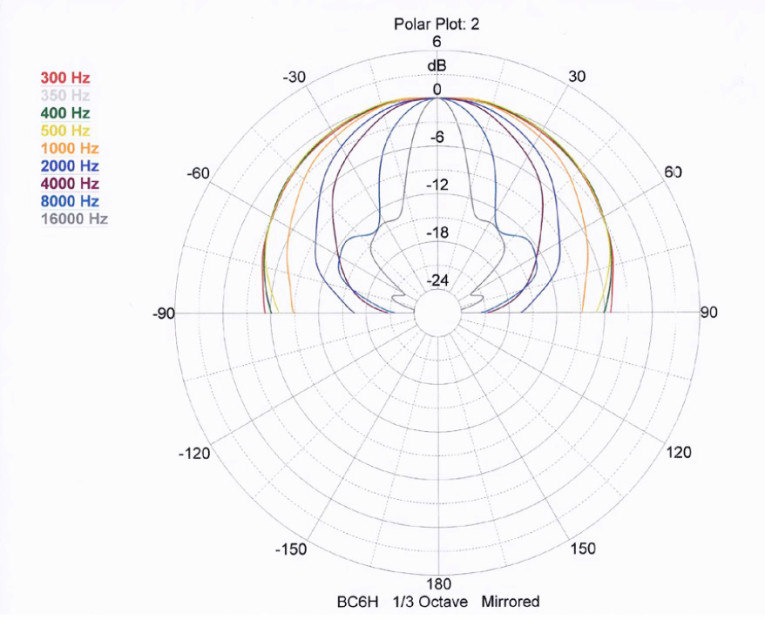
Figure 11 displays the on- and off-axis frequency response at 0°, 15°, 30°, and 45°, showing typical directivity for a 6.5” woofer. The -3 dB at 30° with respect to the on-axis curve occurs at 2.3 kHz, so a cross point in that vicinity should work well to achieve good power response. Figure 12 gives the normalized rendition of Figure 11. Figure 13 displays the CLIO horizontal polar plot (in 10° increments) for the 6MBX44. Figure 14 shows the two-sample SPL comparisons, a close match throughout the operating range.
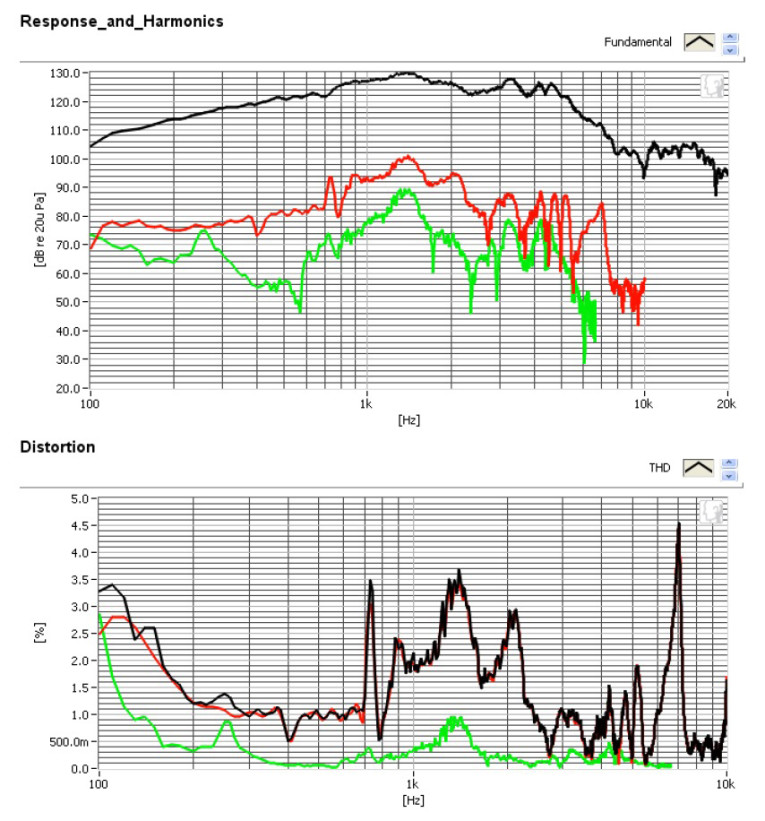
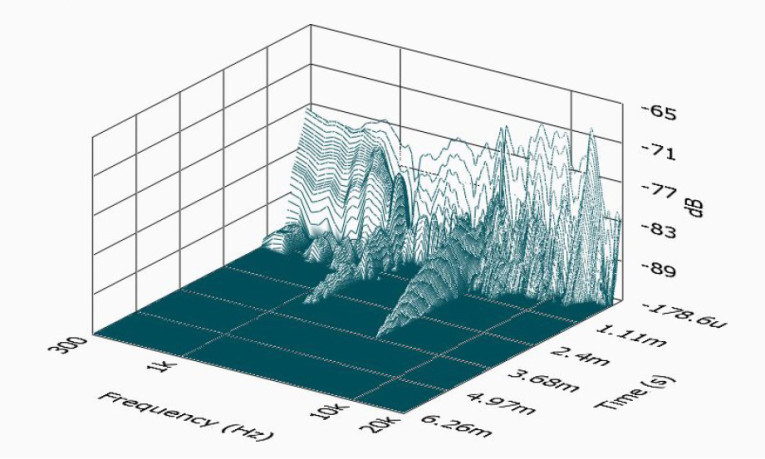
For the remaining series of tests, I employed the Listen SoundCheck AmpConnect analyzer and the SCM microphone to measure distortion and generate time frequency plots. For the distortion measurement, I mounted the 6MBX44 rigidly in free air and set the SPL to 104 dB at 1 m (2.1 V) using a pink noise stimulus. Then, I measured the distortion with the Listen microphone placed 10 cm from the driver. Figure 15 shows the distortion curves. I then used SoundCheck to get a 2.83 V/1 m impulse response and imported the data into Listen’s SoundMap Time/Frequency software.
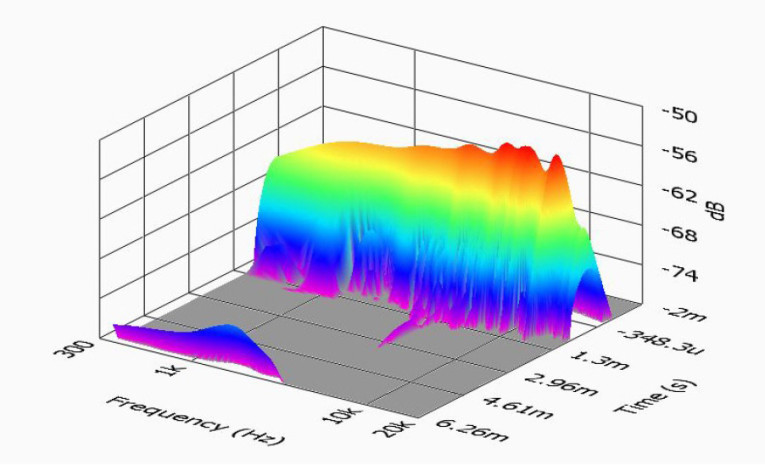
Figure 16 shows the resulting CSD waterfall plot. Figure 17 shows the Wigner-Ville plot. When you are dealing with a competent OEM like B&C Speakers, you come to expect superior consistency and design integrity, which is what you see in the data for the 6MBX44. For more information, visit www.bcspeakers.com. VC
This article was published originally in Voice Coil, January 2017.